疲れにくいうえに、足首や膝に負担がかからない歩き方を身に着けたくないですか?
それこそが、エネルギー効率の高い歩き方と言えます。人間はもとより全ての動物の歩行は、「エネルギー効率を最大化する」という目標が本能的に備わっていると言われています。
これは、限られた食料の中で移動にかかるエネルギーを極力減らしていかなくてはならない、という動物本来が持つ本能のなごりだと考えられています。
人の歩行に限定した場合、エネルギー効率の高い歩き方っていうのはどういうものなのでしょうか?
今回は、その疑問にお答えしたく思います。
Cavagna, G.A., Zamboni, A. 1976. The sources of external work in level walking and running. The Journal of Physiology, 262, 639-657.
Collett, J., Dawes, H., Howells, K., Elswowrth, C., Izadi, H., Sackley, C. 2007. Anomalous centre of mass energy fluctuations during treadmill walking in healthy individuals. Gait and Posture, 26: 400-406.
Vereecke, E.E., D’Aoūt, K.D., Aerts, P. 2006. The dynamics of hylobatid bipedalism: evidence for an energy-saving mechanism. The Journal of Experimental Biology, 209: 2829-2838
Ortega, J.D., Farley, C.T. 2003. Minimising centre of mass vertical movement increases metabolic cost in walking. Journal of Applied Physiology, 99: 2099-2107.
Schepens, B., Bastien, J., Heglund, C., Willems, P.A. 2004. Mechanical work and muscular efficiency in walking children. The journal of Experimental Biology, 207: 587- 596.
Detremblur, C., Vanmarsenille, J., Cuyper, F.D., Dierick, F. 2005. Relationship between energy cost, gait speed, vertical displacement of centre of body mass and efficiency of pendulum-like mechanism in unilateral amputee gait. Gait and Posture, 21: 333-340.
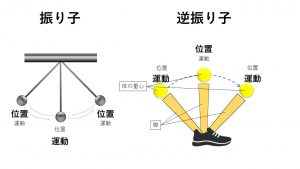
逆振り子運動のメカニズム
まず、人の歩行を「両足が地面に着いている時(両足立脚期)」と「片足しか地面に着いていない時(片足立脚期)」に分けて考えます。前方に体が進むのは、基本的に片足立脚期になりますが、人の歩行は、本来片足立脚期にはエネルギーが必要ないと言われています。
これは、振り子運動と似た原理に基づきます。振り子は、位置エネルギーと運動エネルギーが延々と変換され続けることで、動きが生じています。空気抵抗などが無ければ、理論上この動きは止まることはありません。この振り子運動をさかさまにした形が、人の歩行の原理となっていて、逆振り子運動「Inverted Pendulum」と呼ばれています。横から見れば、体の重心は、片足立脚期において振り子の逆の原理で動いています。つまり、位置エネルギーと運動エネルギーが変換されているが、エネルギーの総量は一定です。もちろん、前方への移動が完璧なエネルギー変換のみで行われることはありませんが、基本原理として片足立脚期は位置エネルギーと運動エネルギーの変換のみで前方へ移動することが可能です。
リカバリー率で分かる歩行のエネルギー効率
一方で、両足立脚期ではエネルギーが必要とされています。その理由は、逆振り子運動では、振り子運動と違い次の逆振り子運動を始める際にどうしてもエネルギーのインプットが必要になるからです。その際に、後ろ足が地面を蹴ることになります。そして、この蹴る強さが強ければ強いほど、エネルギー効率は下がります。なぜかと言うと、もしエネルギー効率が100%であれば、一切地面を蹴る必要が無くなるからです。これは、足が地面に着地した時に衝撃を感じないことも意味します。というのも、衝撃を感じる代わりに、本来衝撃になるはずだったエネルギーをうまく活用して、次の逆振り子運動を開始させるからです。
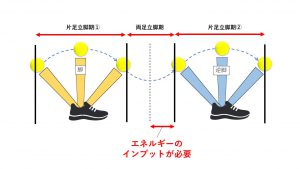
その際、図の「エネルギーのインプットが必要」な区間において、
(1)位置エネルギー
(2)運動エネルギー
(3)総合的なメカニカルエネルギー(位置エネルギーと運動エネルギーの合計)
の3つがどの位上昇したかを計算し、それぞれΔPE、ΔKE、ΔExtで表した場合、エネルギー効率は、リカバリー率で計算することができます。
リカバリー率=(ΔPE+ΔKE-ΔExt)÷(ΔPE+ΔKE)×100%
となります。もしこれが100%であれば、上述した通り、足や下肢関節に衝撃を感じることは無くなります。よって、歩行運動自体からの疲労も限りなく0に近くなります。現実的には、普通の人の普通の歩き方だと60-70%になることが多いと報告されています。リカバリー率は仮に1%でも上げることができれば、その効果は絶大だと考えられます。というのも、例えば歩くことに限定した場合、1日に1万歩を毎日続けると考えた場合、長期的な関節へのダメージなどを減らすのに役立つ可能性があるからです。
エネルギー効率を下げる効果
エネルギー効率は高めた方が、下肢関節への負担が減り疲れにくくなるといったメリットはありますが、デメリットも考えておく必要があります。まず、(ΔExtが無くなるということは)足で蹴りだす必要が全く無くなるということは、筋肉を使う必要が無くなるということで、筋力低下のリスクが生まれます。逆に言うと、エネルギー効率を下げることは、トレーニング効果を生み出すことになります。確かに、疲れを知らず筋肉を一切使わずとも移動できるのはある意味良いかもしれませんが、筋力トレーニングの観点から考えると、エネルギー効率を下げる必要があります。しかし、その場合は下がったエネルギー効率が一点に集中しないように細心の注意が必要です。もう一つ考えるべきことは、ある程度の衝撃を関節に与えることは重要であったりします。例えば、膝の例で考えると、ある程度衝撃を加えることが軟骨の再生などを開始する合図となります。こうした刺激が無いと、筋肉以外の結合組織も弱ってしまう可能性があります。
まとめ
歩行は①片足立脚期と②両足立脚期に分けられ、片足立脚期では重心の位置エネルギーと運動エネルギーを効率的に変換させることで、総エネルギー量を一定にすることができれば、エネルギー効率が高まります。両足立脚期においては、エネルギーのインプットが必要になり、それによって人の歩行は60-70%程度は、エネルギーが再利用されていると考えられています。エネルギー効率を下げることでトレーニング効果が生まれることになりますが、体の一か所に負担がかからないように細心の注意が必要となります。
エネルギー効率を高める効果のあるISEALインソールの使用もご検討ください。かかと着地時の衝撃を活用してつま先離地の際に過度な足の蹴りだしを予防する構造になっています。また、表面の突起は衝撃のエネルギーを一番理想的な道順を通るように足の使い方を誘導してくれます!怪我予防と疲労感の少ないウォーキングのおともに!
(文章:Victoria大学 長野放博士)